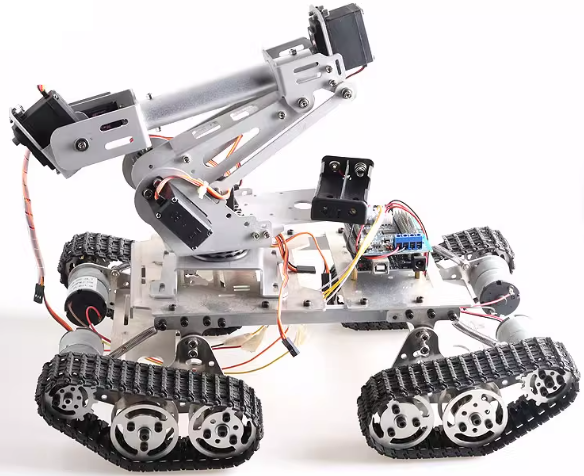
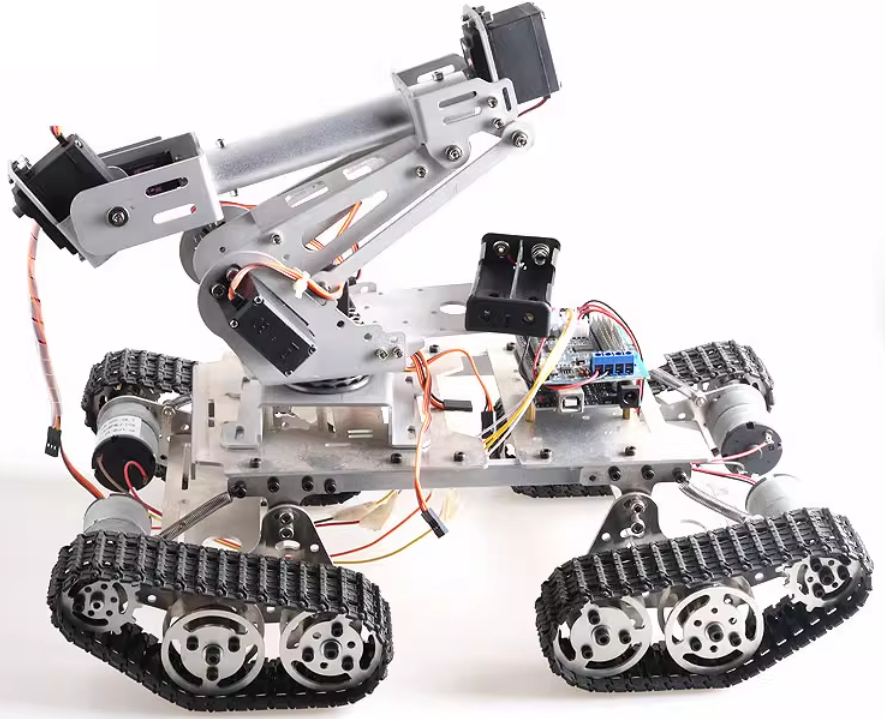
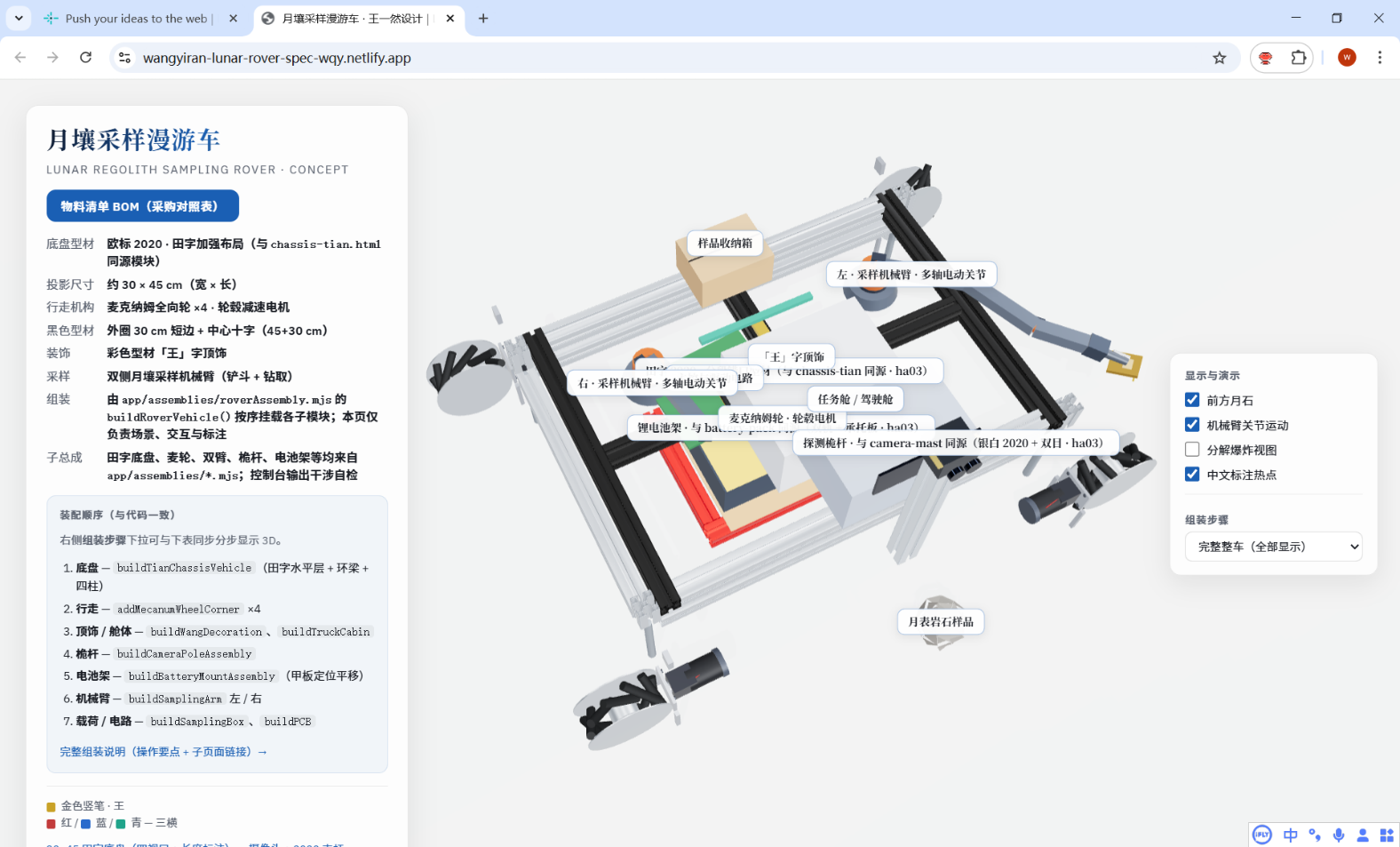
搭载摄像头作为"眼睛",利用 AI 视觉识别技术,精准区分月球表面的岩石与土壤。前端配备类似抓娃娃机的多轴机械臂结构,可以灵活抓取各种形态的岩石,并安全存入后背收纳箱中。采用履带式底盘,轻松应对月球复杂地形。
利用人工智能技术实时分析月表图像,自动识别有价值的岩石样本。
采用履带结构增大受力面积,确保在月球松软土壤上稳定行驶。
前端抓钩采用多轴机械臂设计,灵活精准地完成岩石抓取任务。
AI 计算单元通过无线通信进行远程智能决策与控制指令传输。
一位小学生用双手和 AI 让月球梦想照进现实

这张照片记录了王一然同学正在用手柄遥控器操控 AI 月石采集车的真实场景。他亲手组装了底盘、机械臂和 3D 打印的仿生手,并编写控制程序让它们协同工作。
从构思到实现,从画草图到 3D 打印,从焊接电路到编写代码——每一步都由这位小学生独立完成。这不仅是一个科技作品,更是一个孩子对太空探索的无限热爱。
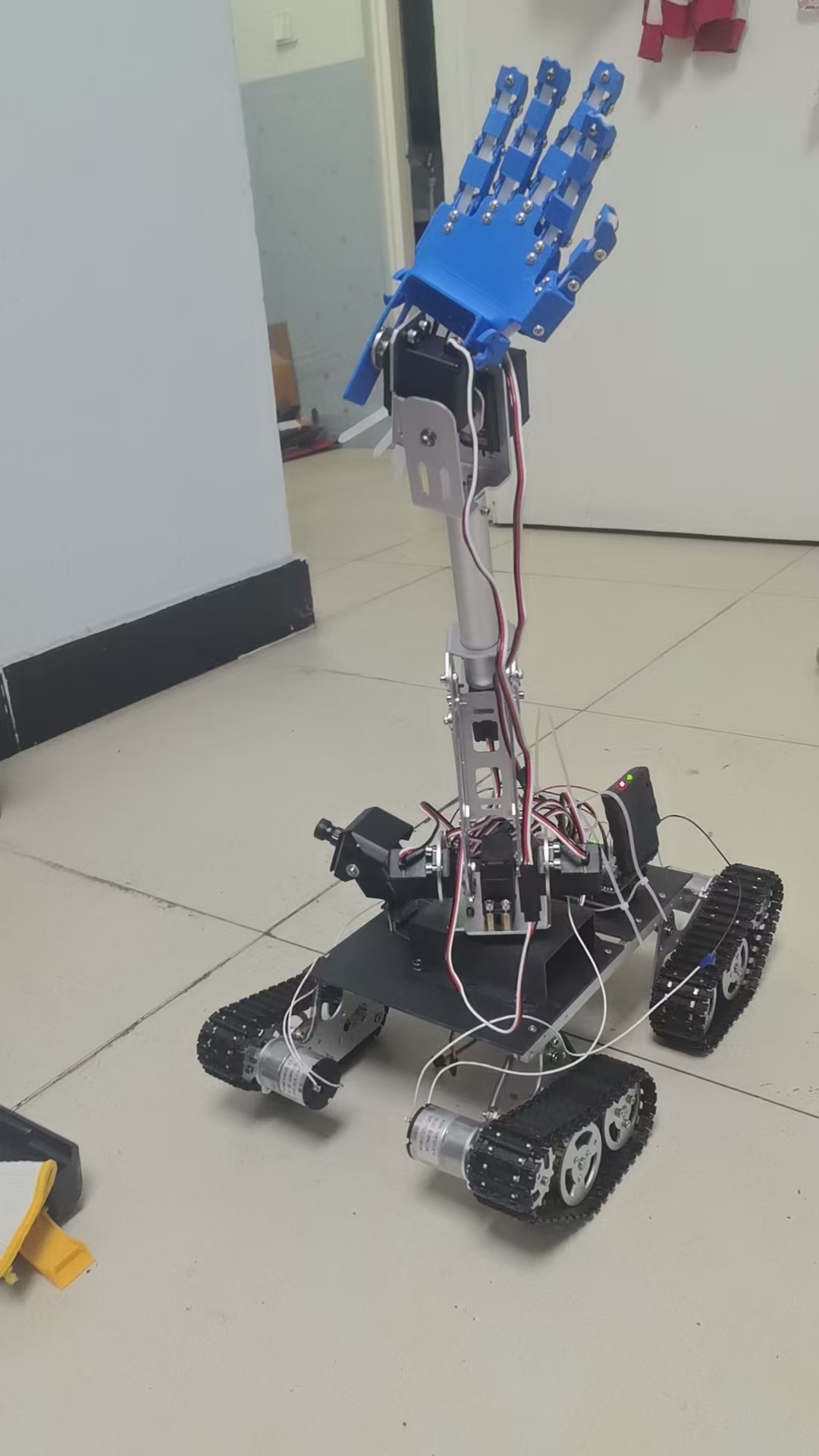
蓝色仿生手由 3D 打印制作,安装在机械臂末端,能做出灵活的抓取手势

未来的月球车将利用机械臂精准抓取月表岩石,实现全自动采样
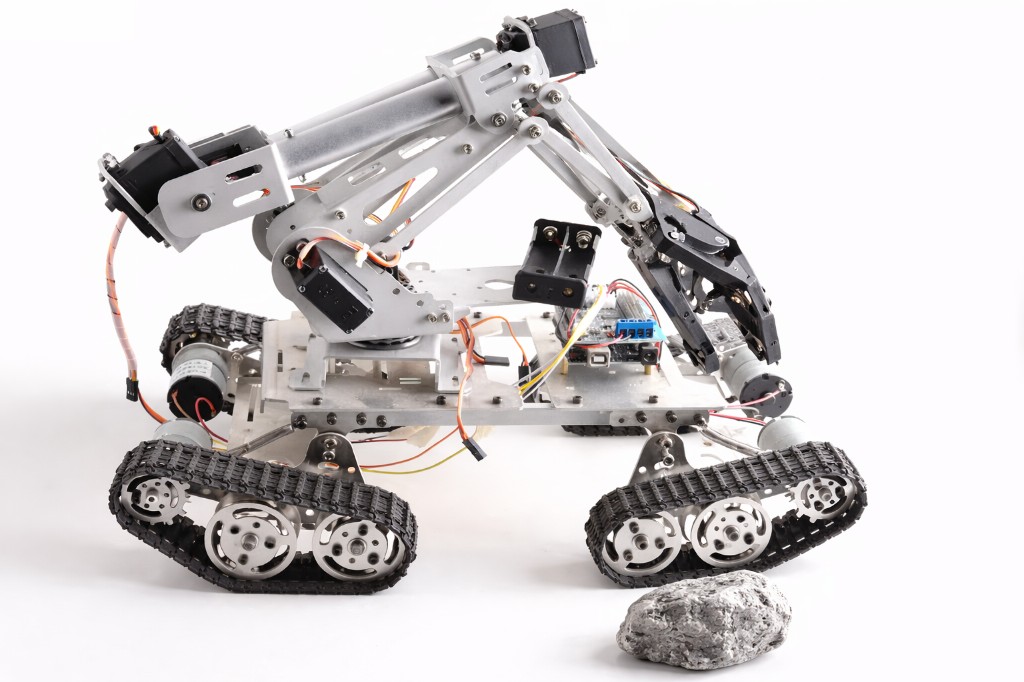
最终版采用金属夹爪,配合履带底盘,可在复杂地形稳定抓取岩石
观看 AI 月石采集车的实际运行演示
AI 月石采集车运行实况演示
机械臂与夹爪操控演示

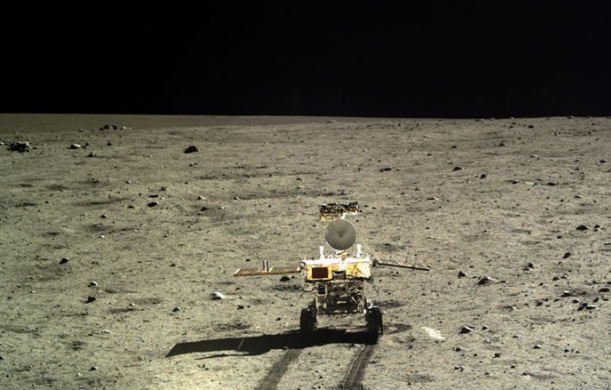
中国嫦娥三号搭载的月球车,在月表留下了车辙印痕

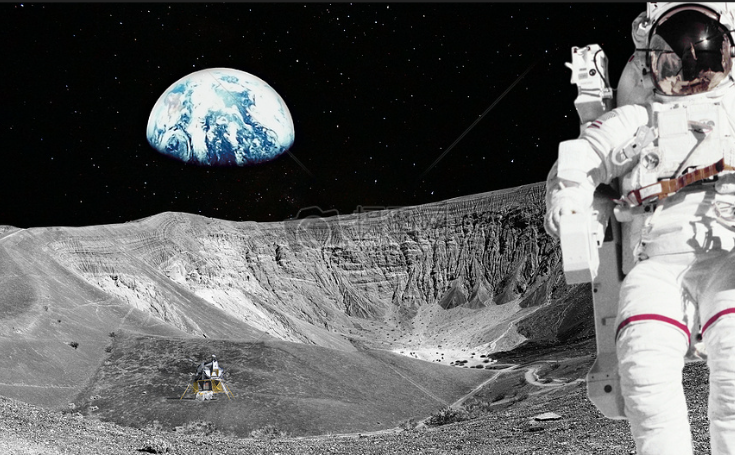
中国探月工程着陆器与散布的月表岩石

人类最早的月球漫游车——启发了我们的设计

阿波罗宇航员用铲子采集月表岩石——未来由 AI 机器人替代

月球表面散布着各种大小的岩石,正是 AI 识别的目标

宇航员正在研究月表巨石的分层结构

宇航员独自行走在广阔的月球表面,探索未知领域

宇航员在月球上插上旗帜,远处可见蔚蓝的地球家园

多位宇航员在月球表面协同作业——未来将由 AI 机器人接替

阿波罗时代,宇航员必须亲自弯腰用工具采集每一块岩石。嫦娥工程实现了无人月球车的探测。而我们的 AI 月石采集车更进一步——搭载视觉大模型,能够自动识别、定位并抓取月表岩石,让月球采样真正进入智能时代。
搭载支持 4G/WiFi 双模的工业级无线摄像头,支持 RTMP 实时推流和 RTSP 拉流协议。即插即用,无需布线,通过蜂窝网络将月球表面的高清画面实时传回地球控制中心。红外 LED 补光确保在月球阴影区也能清晰成像。

摄像头实时截帧后,将图像通过无线网络发送至 AI 大模型(Llama 4 Scout Vision)进行分析。大模型能精准区分月球表面的岩石与土壤,输出每块岩石的位置坐标、类型分类和置信度,在画面中实时标注目标位置。

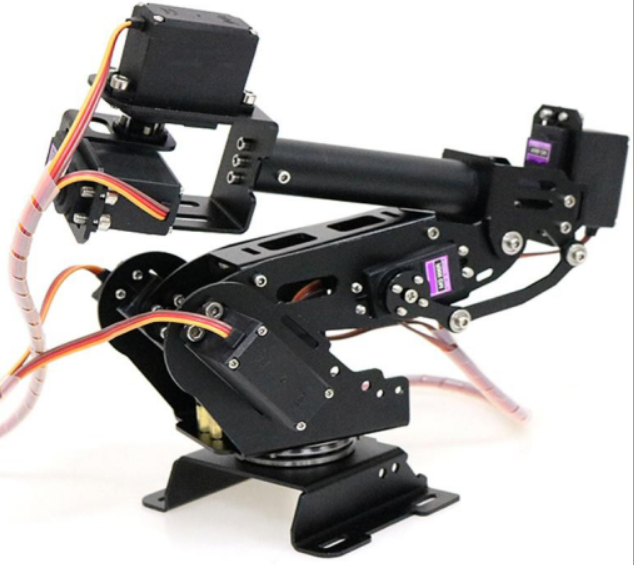
配备 6 自由度机械臂,前端抓钩可以精准抓起各种形态的岩石样本。臂展达 24cm,配合精密数字舵机驱动,实现灵活多角度操作。AI 识别出目标后,自动规划最优抓取路径。
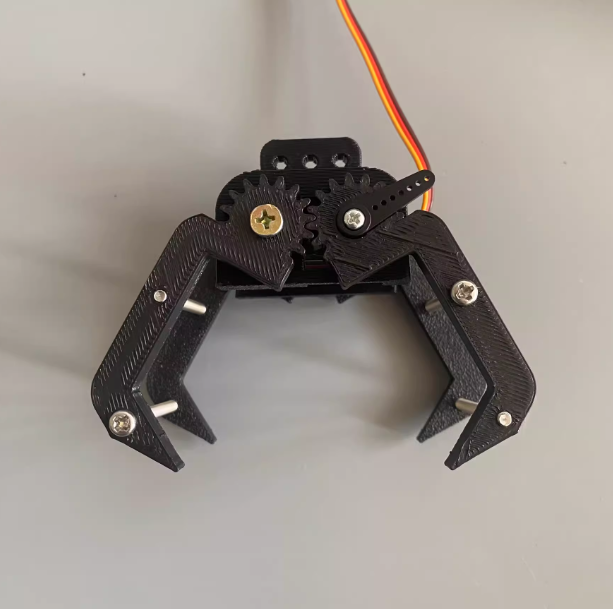
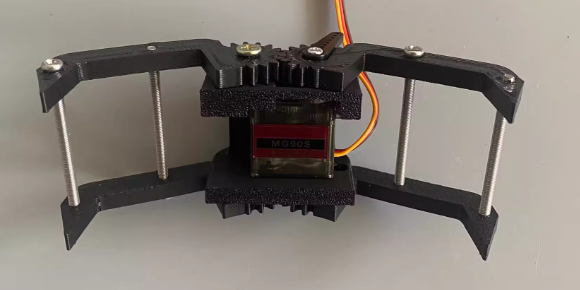
自主设计并 3D 打印的夹爪系统,包含四爪联动式和平行开合式两种方案。齿轮传动机构确保多指同步开合,MG90S 舵机驱动,可适应不同尺寸和形状的岩石样本,抓取稳固可靠。
将万向轮升级为履带结构,大幅增加与地面的接触面积,有效避免在月球松软土壤中下陷。四履带独立驱动,应对各种复杂地形环境。
每一个精心挑选的组件,共同构成这辆智能月球探测车
履带底盘 + 6DOF 机械臂 + 4G 摄像头 + AI 视觉的完整集成
双天线 · 红外夜视 · RTMP推流

RTSP/RTMP · SDK开放 · 4G联网
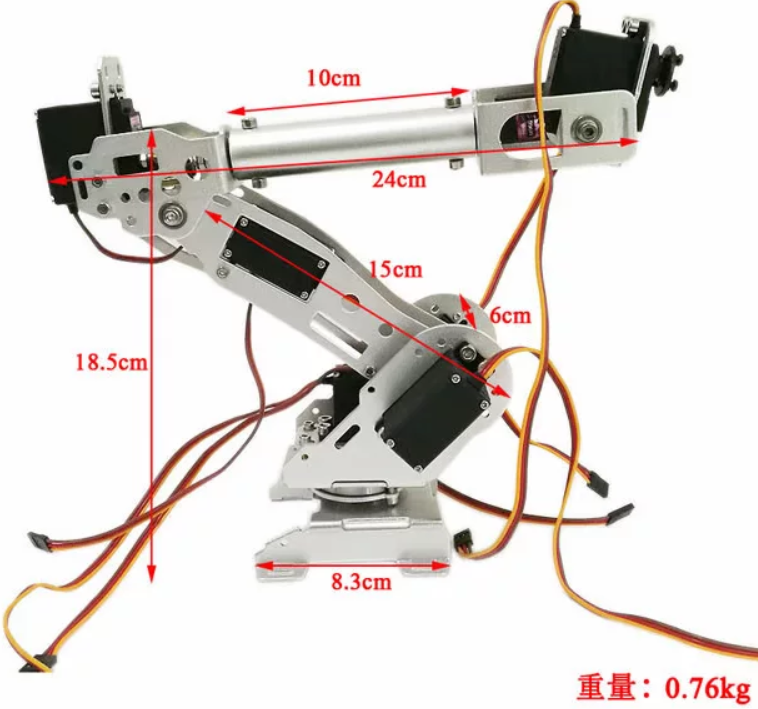
6自由度 · 臂展24cm · 重量0.76kg
全金属 · 数字舵机 · 高精度
齿轮传动 · 四指联动 · 自主设计打印
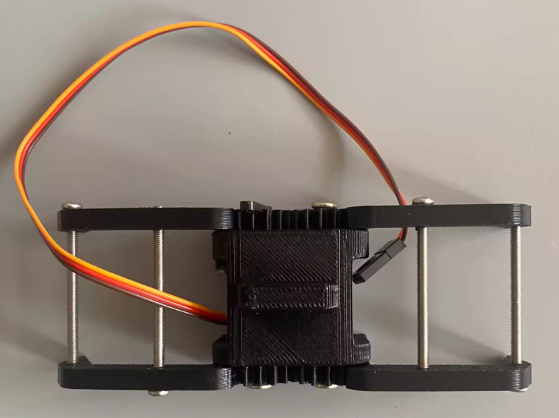
螺杆导轨结构 · 平行开合 · 稳定夹持
MG90S 舵机驱动 · 3D 打印框架 · 大开合距

双齿轮啮合 · 同步开合 · 抓取可靠
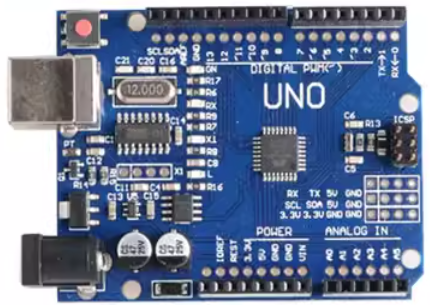
核心控制器 · ATmega328P · 14路数字IO
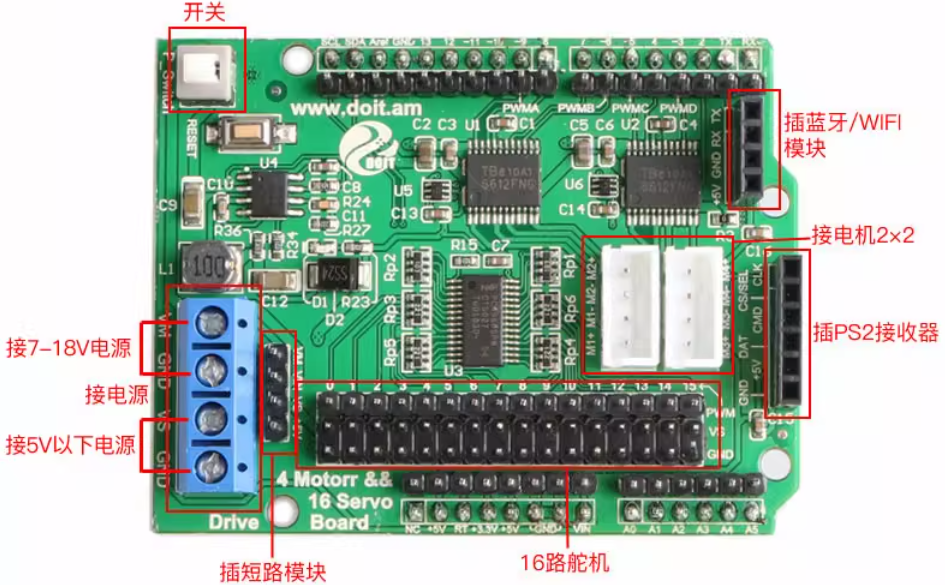
4路电机 + 16路舵机 · 蓝牙/WiFi · 7-18V
月球表面土壤松软,普通轮式结构容易下陷。我们发现需要增大受力面积来解决这个问题。
将万向轮改为履带结构,大幅增加接触面积,确保小车在月球表面稳定行驶不下陷。
通过无线通信技术将 AI 系统与车体分离,使用远程终端进行智能决策和控制。
运用 AI 进行整体设计,部分零件 3D 打印制造,部分零件外部采购,最终组装成型并开发控制程序。
成功制作出一款履带式月球采样机器人模型,搭载 AI 驱动的月表岩石识别系统。
采用 4G+WiFi 双模工业摄像头作为小车的"眼睛"。摄像头通过 4G/5G 蜂窝网络接入互联网,将实时视频通过 RTMP 协议推送至流媒体服务器。操控端通过 RTSP/WebRTC/HLS 等多种协议拉取视频流,实现多终端(手机、平板、PC)同时在线观看和控制。
 4G 双天线摄像头
4G 双天线摄像头
 网线接口版
网线接口版
 RTMP 直播推流
SDK 开发摄像头
RTMP 直播推流
SDK 开发摄像头
车载摄像头以每秒 1 帧的频率截取画面,通过 4G 网络传输至云端 AI 服务。采用 Meta Llama 4 Scout Vision 多模态大模型进行图像理解,模型能精准识别:
以下是真实月球表面的岩石采样场景——也是 AI 大模型识别训练的参考对象。在操控台的「演示 Demo」模式中可使用这些月石图像进行实时 AI 识别体验。
 耙式采集
耙式采集
 月表碎石
月表碎石
 定点采样
定点采样
 月面足迹
整车正面
整车侧面
夹爪齿轮机构
岩石抓取演示
月面足迹
整车正面
整车侧面
夹爪齿轮机构
岩石抓取演示
将人工智能技术与航天探测深度结合,赋予探测车自主决策能力。
不同于大多数采集土壤的方案,本项目专注于月球岩石样本的智能采集。
从设计到制造到程序开发,AI 贯穿整个项目生命周期。
接入摄像头或上传图片,AI 实时识别岩石与机械臂位置。演示模式内置 16 张真实月球表面照片,全自动循环识别——无需任何准备,一键体验 AI 采样全流程。
🛰️ 进入操控台
这是一辆可以用来采集月表岩石的智能小车。从设计到制造,从 AI 识别到远程操控,每一步都由一位小学生带着对太空的热爱完成。
"我们的展望是希望这辆小车能真的登上月球,
成为第一个登上月球的小朋友小车。"